概要
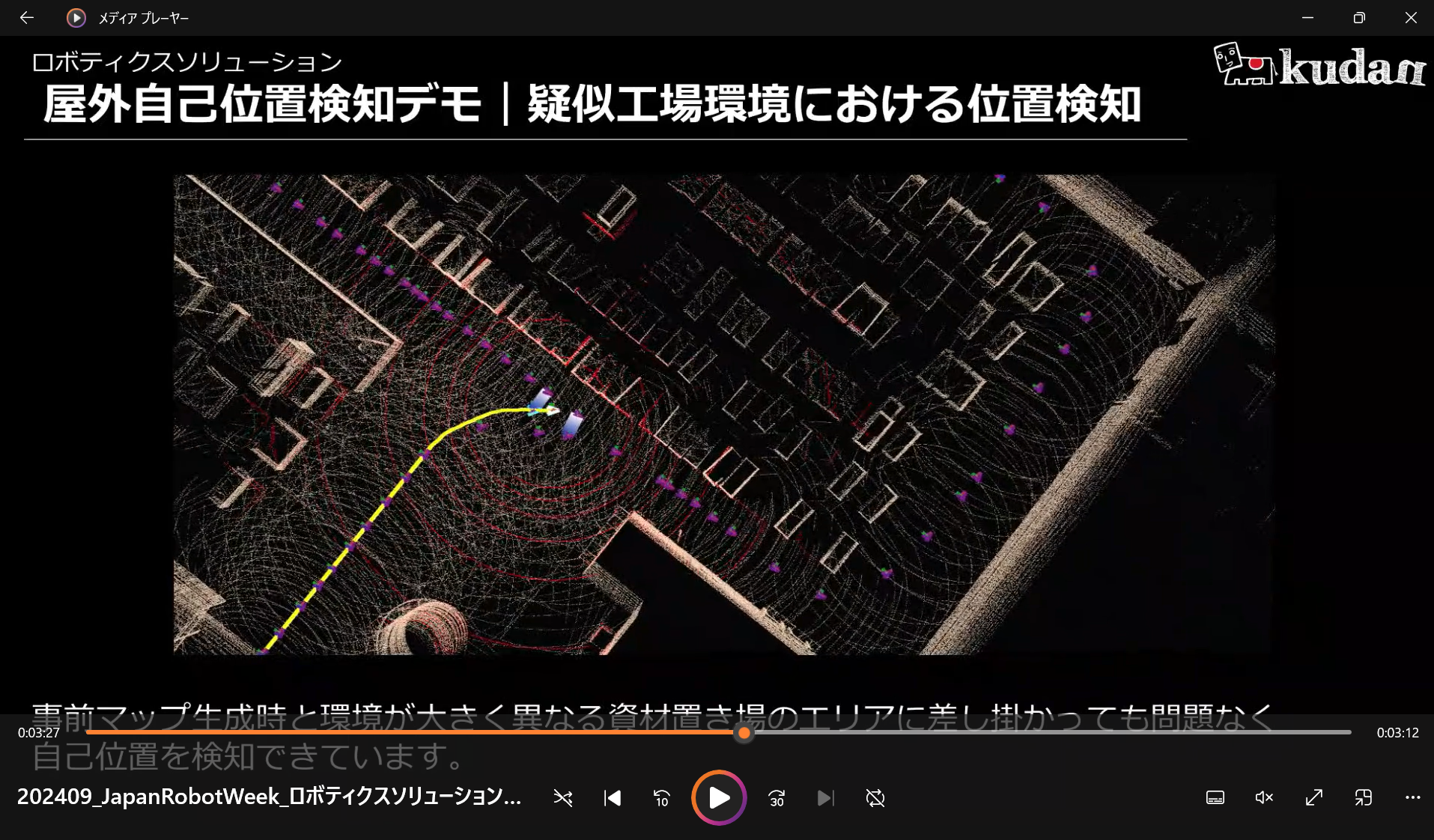
位置推定とマッピング(SLAM)における当社の専門知識と最先端のAI技術を組み合わせることで、移動ロボットナビゲーションのための包括的な「モバイルロボットナビゲーションスタック」を提供します。当社のソリューションは、自律型ロボットおよび車両の検証と実装にかかるリードタイムを大幅に短縮します。
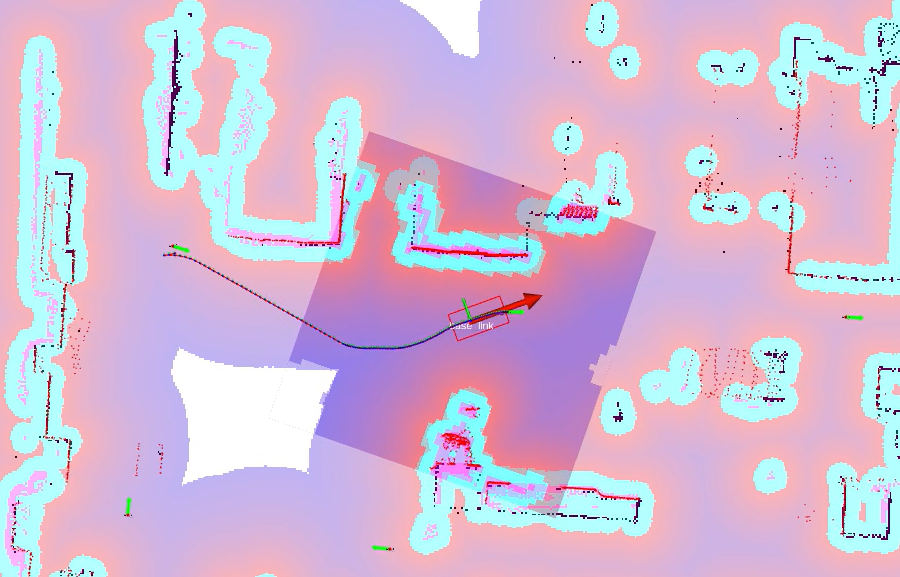
堅牢な位置推定(SLAM)
経路計画
障害物回避
意味的セグメンテーション

タスク計画と車両制御
システム監視
タスク計画と車両制御

- Ros2 Humble/Jazzy
- Intel/ ARMベース
- マルチセンサー融合
- マルチトラッキングモード
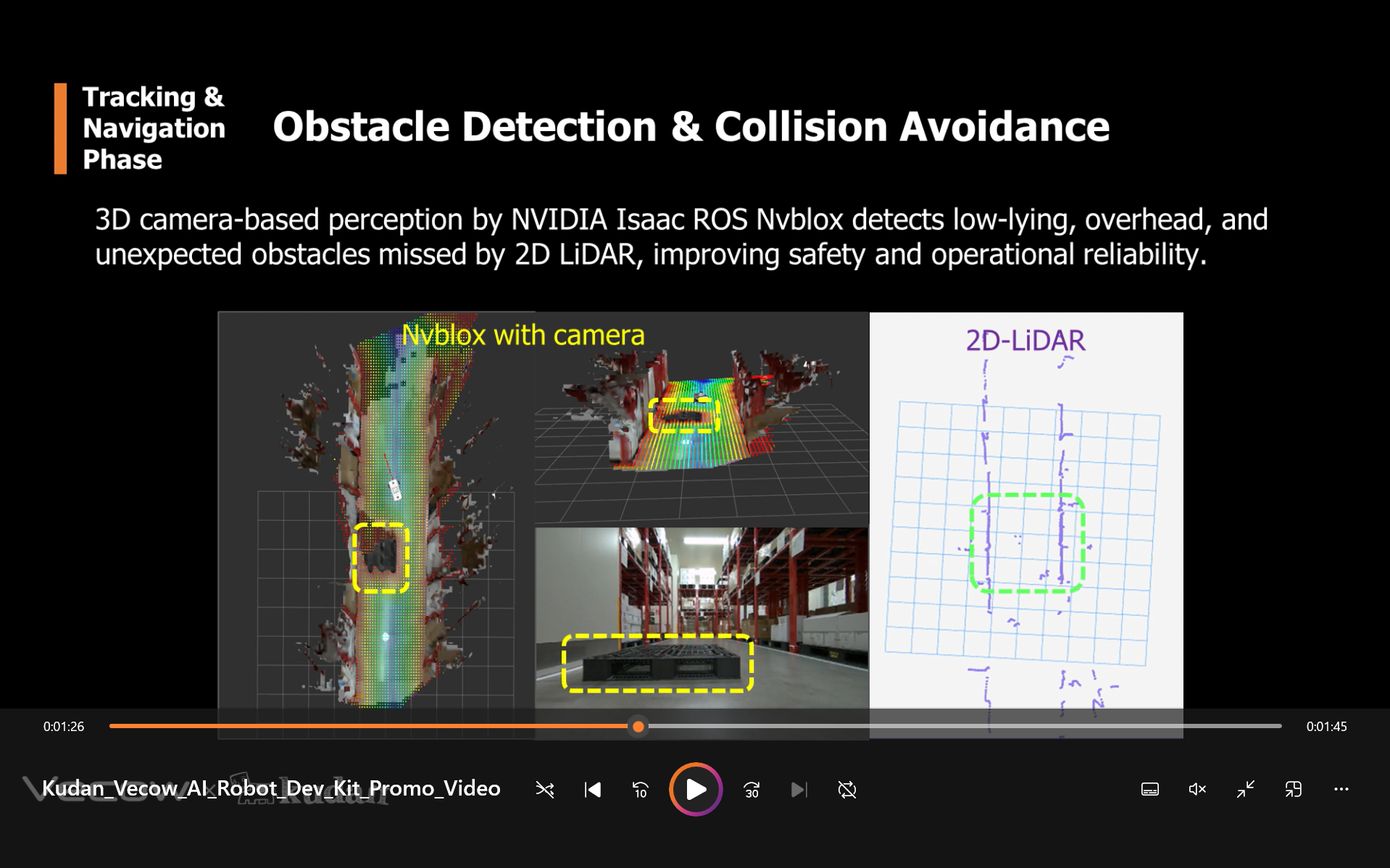
衝突回避
3D空間認識により、ロボットは2D LiDARでは検知できない3D障害物をリアルタイムで検知・回避できる。
動的マスキング
画像内の人物などの障害物に対して高度なマスキングを動的に適用することで、マッピングと追跡の精度を向上させることができます。
セマンティックセグメンテーション
カメラベースの物体認識(人物、自動車、トラック、マーカーなど)を提供します。これにより、識別された物体に基づいてロボットの動作を区別するなど、より高度なナビゲーション制御を展開することが可能になります。
写真のようにリアルなデジタルツイン上でのロボットシミュレーション
ハンドヘルドスキャナーで実世界の環境を事前スキャンすることで、現実世界の形状や外観を正確に再現したフォトリアリスティックな3Dデジタル空間を容易に生成できます(フォトリアリスティックなデジタルツインの詳細については、こちらのリンクをご参照ください)。
さらに、この空間内でロボットシミュレーションを実行することで、実規模実装に必要な開発・検証時間を大幅に短縮できます。
有脚ロボットへの最適化
有脚のロボットの挙動に最適化したナビゲーションにより、安定的にロボットの自律走行を可能にするだけでなく、遊脚ロボットの柔軟な動作や高い走破性を最大活用するロボットアプリケーションを実現します。