Overview
By combining our expertise in Localization and Mapping (SLAM) with cutting-edge AI technology, we offer a comprehensive "Mobile Robot Navigation Stack" for mobile robot navigation. Our solution dramatically reduces the lead time for autonomous robot and vehicle verification and implementation by providing optimized development tailored to each specific application.
Robust localization(SLAM)
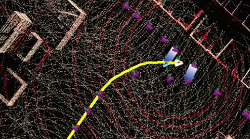
Path Planning
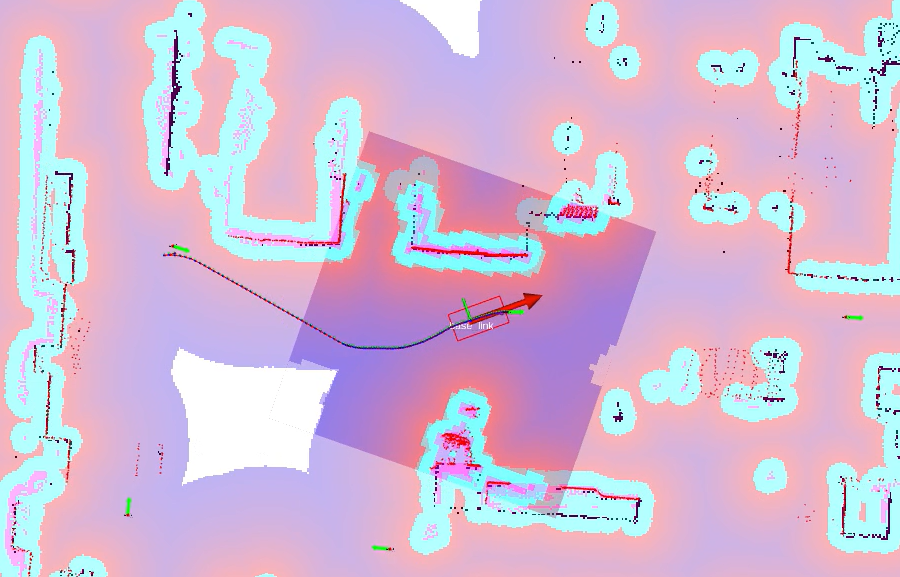
Obstacle avoidance
Semantic Segmentation

Task Planning and Vehicle Control
System Monitoring

Simulation

- Ros2 Humble/Jazzy
- Intel / ARM base
- Multi Sensor fusion
- Multi Tracking mode
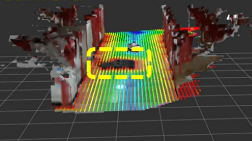
Collision Avoidance
By 3D spatial perception, robot can detect and avoid 3D obstacles in real time that 2D LiDAR cannot.
Dynamic Masking
By dynamically applying advanced masking to obstacles like people in the image, we can achieve improved accuracy in mapping and tracking.
Semantic Segmentation
Offer various camera-based object recognition such as for people, cars, trucks, and markers. This allows us to deploy more advanced navigation control, such as differentiating robot behavior based on the identified object.
Robot Simulation on Photo Real Digital Twin
By pre-scanning the real-world environment with a handheld scanner, you can easily generate a photorealistic 3D digital space that accurately reproduces the shape and appearance of the real world (to learn more about photorealistic digital twins, please refer to this link). Furthermore, performing robot simulations within this space can significantly reduce the development and verification time required for a full-scale implementation.
Optimisation for legged robot
By optimizing navigation for the unique behaviors of legged robots, we not only enable stable autonomous operation but also unlock applications that fully leverage their flexible movements and high terrain adaptability. This allows robot applications to maximize the inherent advantages of legged mobility.
Government funded R&D project
We are promoting a Japanese government (Ministry of Economy Trade and Industry) funded project, “Research and Development of Software Development Infrastructure in the Robotics Field for the Construction Market” under the program “Post-5G Information and Communication System Infrastructure Enhancement R&D Project / Establishment of Software Development Infrastructure in the Robotics Field.”
Overview
- Target Applications: Primarily construction-related applications, focusing on four-wheeled robots without legged driving.
- Scope of R&D: Standardization of software modules and establishment of reference models, with consideration for communication interfaces as well as SW/HW interoperability and scalability
- https://www.nedo.go.jp/koubo/CD3_100400.html (Japanese only)