V-MMS (Vehicle Mobile Mapping System)
Overview
High-precision Mobile Mapping Systems (MMS) have been available for some time, but have not yet achieved widespread market adoption due to various factors. Kudan's V-MMS is an innovative product designed to overcome the challenges faced by conventional MMS.
Conventional MMS Challenges
- High quality but expensive
The point cloud quality is high, but the price is expensive, which creates a high barrier to easy point cloud acquisition and generation. - Difficulty integrating with other point clouds
Although simple alignment is possible, point cloud acquisition is generally intended to be done with the same model of device. - Difficult to use and master
It requires a certain level of expertise, and it takes time to master its use.


Concept of Kudan V-MMS
- Easily acquire high-quality point clouds at a low cost.
-> Offered at up to one-tenth the price. - Advanced map integration using relocalization technology refined through our robotics business.
-> Can be integrated with 3rd party point cloud - A simple, user-friendly UI that includes elements of automation.
-> Can be used without any professional backgrounds.
Examples of Outputs
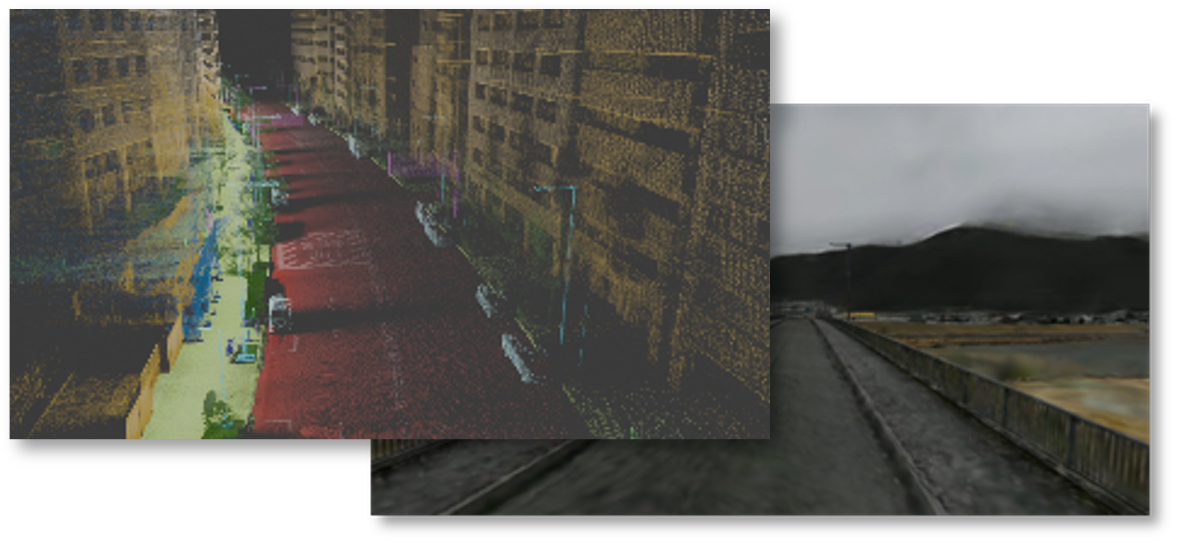
We provide a wide range of high-quality outputs, not only generating point clouds but also combining them with cutting-edge AI technology.
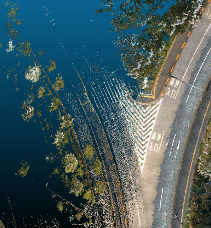
Colorised 3D point cloud


Semantic segmentation (3D point cloud)


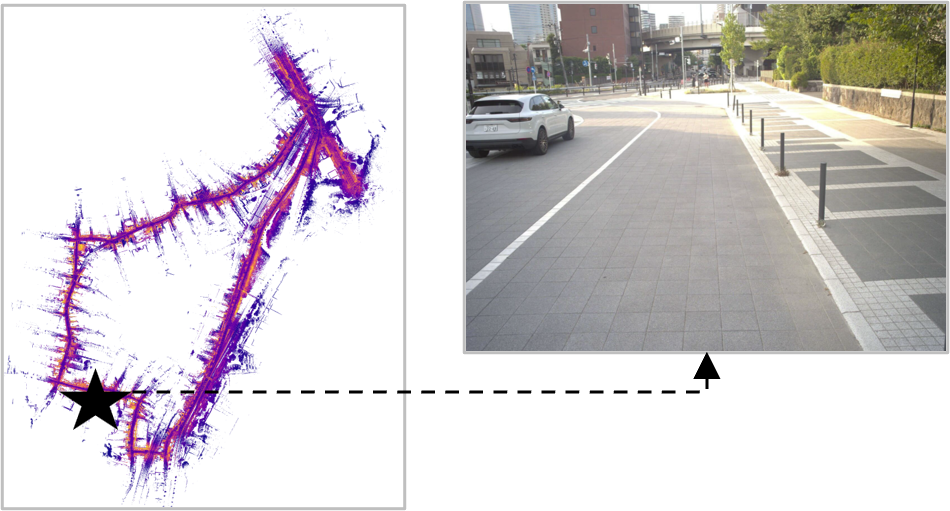
Georeferenced high-precision image
Example of On-Vehicle Installation

Characteristics
Hardware:
Simple configuration that can be retrofitted to existing vehicles.

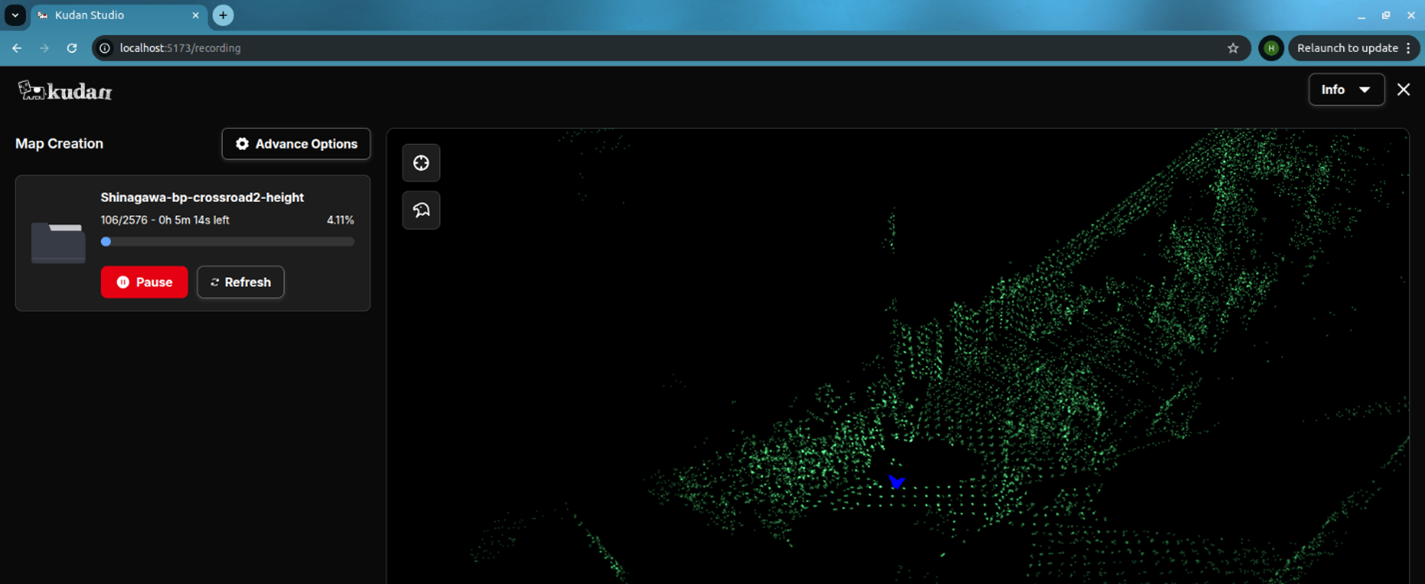
Simple UI:
Intuitive operation with no specialized knowledge required.
Noise Filtering:
Advanced noise filtering that integrates object recognition technology.
GCP Correction:
Simple UI for ground control point (GCP) input and map-wide accuracy correction.

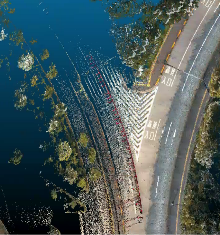
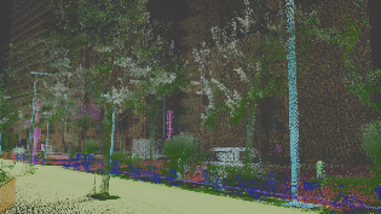
Map Handling:
Advanced map integration with 3rd party point clouds is also possible.

Blue: 3rd party
pointcloud
White: Kudan
pointcloud
Red: Difference
between 2
pointclouds
Semantic Segmentation:
Segmentation of objects within a point cloud using AI image recognition technology.

Use cases
Surveying

Disaster prevention and management

Next-generation applications through 3D Point Clouds x Imagery x AI