ROBOT SOLUTION
Localization & Mapping
(SLAM)
Commercial-Grade SLAM
for Reliable Navigation in Any Environment
Kudan GrandSLAM
Delivering High-Precision, Highly Robust 6DoF Localization to Any Operational Environment
Kudan GrandSLAM, Kudan’s localization and environment mapping technology, is a commercial-grade SLAM solution designed for deployment in real-world environments.
By maximizing the value of data from diverse sensors, it enables stable localization and mapping across indoor and outdoor environments, stationary and rough terrain, and under varying lighting and weather conditions.
Designed for Commercial
Deployment & Development
Ease of Development & Integration
Provided as a C++ library
Supports ROS2 wrappers
Compatible with NVIDIA Jetson, Intel, and Raspberry Pi
Commercial-Grade Performance
High precision, low latency, and high stability
Reliable operation even under harsh real-world conditions
Scalable expansion for large-scale maps
Supports mapping of entire factories and wide-area environments
Easy integration with external systems
Seamless integration into existing autonomous driving systems
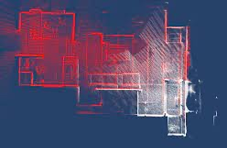
Kudan Visual SLAM
Commercial-Grade Visual SLAM for Both On-Road and Off-Road Environments
Kudan’s Visual SLAM is a commercial-grade SLAM solution designed for real-world deployment, achieving high-speed processing, low memory consumption, high precision, and high stability simultaneously.
Compared with open-source and conventional research algorithms, it overcomes challenges related to processing speed, latency, and stability.
t enables stable localization not only in paved road environments (on-road), but also in off-road environments including unpaved roads, uneven terrain, and natural environments.
Key Features
High-Speed, Low-Latency Localization
Stable Tracking in Dynamic and Complex Environments
Supports Diverse Camera Configurations (Stereo / RGB-D / Mono / Fisheye / 360° / Multi-Camera)
Demonstration
Semantic Dynamic Masking
Dynamically recognizes and semantically identifies moving objects such as people, and excludes them from mapping and tracking.
This enables more stable map generation and self-localization even in dynamic environments with many moving objects.
SuperPoint
Deep learning–based feature extraction.
Supports outdoor environments, seasonal changes, and weather variations that conventional Visual SLAM has struggled with.
Enables highly accurate re-localization even under different environmental conditions.
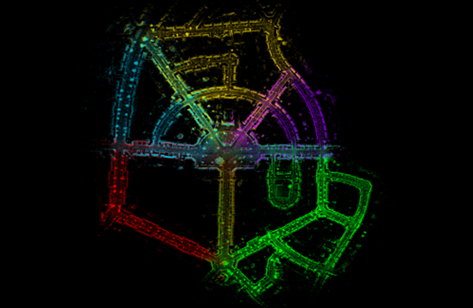
Kudan 3D-LiDAR SLAM
Kudan’s 3D-LiDAR SLAM fundamentally resolves the challenges of accuracy, map size, latency, and robustness faced by conventional approaches.
Outstanding Performance
Localization Accuracy
Within1cm
※Depends on the LiDAR used and the operating environment
Map Size
Supports mapping at up to 1/300 scale of satellite imagery
Latency
Near Zero
Pose Output
Up to 60Hz
Enabled through IMU integration and patented high-speed sensor fusion technology
Stable localization even in long tunnel environments
Broad LiDAR Compatibility
Rotary LiDAR
Solid-State LiDAR
Supports nearly all LiDAR types, including prism-based LiDAR
High-Quality Point Cloud Generation
Detects and corrects LiDAR motion distortion during mapping
Simultaneously achieves clearer point cloud generation and improved localization accuracy
Demonstration
Map Handling
Practical Map Management Functions for Large-Scale and Long-Term Operations
Maps generated through SLAM can be managed with long-term operational deployment in mind.
Flexible operation of generated map data supports the stable long-term operation of autonomous navigation systems.
Map Handling
- Save
- Merge
- Update
Adaptive to Changing Conditions
Supports runtime switching between multiple maps generated under different environmental conditions (weather, time of day, etc.)